Autonomous Driving
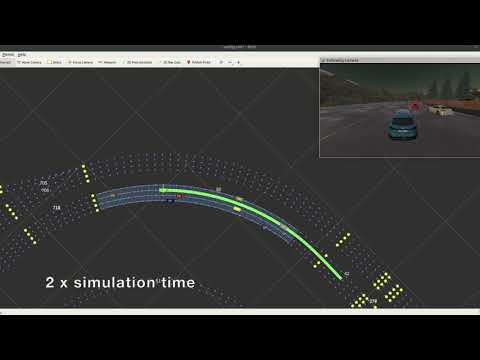
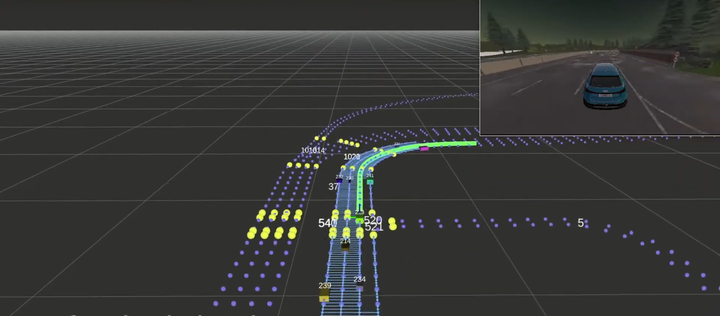 Screenshot of our motion planning algorithm (FELP) working in CARLA
Screenshot of our motion planning algorithm (FELP) working in CARLA
This is an on-going research project funded by Qualcomm. The goal of the project is to advance the motion/behavior planning algorithms for self-driving vehicles.
As an initial step, we made the following assumptions to make the problem more accessible:
- The traffic is a deterministic system.
- The behavior of agent vehicles (vehicles around the self-driving/ego vehicle) are known. We assume agent vehicles are lane follows with acceleration modulated by an intelligent driver model.
We proposed Feedback Enhanced Lattice Planner (FELP). The contribution of the work were:
- We used feedback, instead of open-loop, motion primitives for the ego vehicle (thus the name of the method). The lattice dimension to be searched is reduced, leading to a reduction in runtime complexity.
- We introduced two variants of FELP to further reduce the runtime complexity to polynomial time.
- We further proposed a directed graph map to model the structured road environment.
Below is a video highlighting FELP working with CARLA simulator.
Related publication: [Sun, IROS2020] [Code]
For the next step, we beg the question of modeling the stochasticity in traffic dynamics and planning motions for the ego vehicle therein.
Ke Sun
Software Engineer
My research interests include state estimation and stochastic motion planning with applications to micro aerial and self-driving vehicles.